# 指令系统
## 基本概念
## 指令格式
## 寻址方式
## 数据的对齐和大小端存放方式
## CISC和RISC
## 高级程序语言与机器代码之间的对应
- 编译器、汇编器和链接器
- 选择结构语句
- 循环结构语句
- 过程调用对应的机器级表示
指令系统
本章也是重点,常常在大题中与 CPU 放在一起考察。需要熟练掌握指令的格式以及寻址方式,并且能够根据题目灵活应变。
1 - 格式和寻址方式
指令格式是计算机组成原理中的重点考察内容,需熟练掌握,常常在大题中与 CPU 的知识交叉考察。
指令格式
指令的功能就是 对某些数据 进行 某种操作。
所以指令中主要包含两个部分:操作码(opcode)以及 地址(address)。
- 操作码(opcode)就是决定了指令的类型:
- 这个指令是干嘛的?进行哪种操作?
- 地址是一个通用含义,指的是操作的对象:
- 可以是一个 内存地址(
<addr>) - 也可以是 CPU 中的一个寄存器编号(
<reg>) - 也可以是一个 立即数(
<imm>)
- 可以是一个 内存地址(
指令类型
根据操作码分类
指令根据其 操作码(opcode)的不同可以分为以下类别:
- 数据传输指令
MOV:将数据从一个位置传输到另一个位置,可以是寄存器到寄存器、内存到寄存器、寄存器到内存等。PUSH:将数据(通常是寄存器中的值)推入堆栈。POP:从堆栈中弹出数据并存储到寄存器中。
- 算术和逻辑运算指令
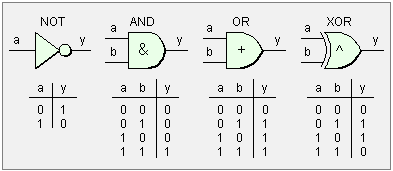
ADD、SUB、MUL、DIV:执行算术运算,如加法、减法、乘法和除法。AND、OR、XOR、NOT:执行逻辑运算,如按位与、按位或、按位异或和按位取反。INC、DEC:递增和递减操作数的值。CMP:用于比较两个值,并根据结果设置标志寄存器的状态。
- 控制转移指令
JMP:用于无条件跳转到指定的目标地址。Jxx:条件跳转指令,根据特定的条件(如零标志、进位标志等)来决定是否跳转。CALL:调用子程序或函数。RET:从子程序返回。
- 输入/输出指令
IN:从外部设备或端口读取数据。OUT:向外部设备或端口发送数据。
- 字符串操作指令(String Instructions):
MOVS、LODS、STOS、CMPS:用于在内存中执行字符串操作,如移动、加载、存储、比较。
- 陷阱指令(Trap Instructions):
INT:用于引发中断,通常用于与操作系统进行通信。
- 协处理器指令(Coprocessor Instructions):
CLI、STI:用于清除和设置 CPU 的中断标志,通常只能在内核模式下执行。
根据地址个数分类
根据指令中的 地址 个数,可以将指令划分为以下类型。
这些地址可以是 寄存器、内存地址,也可以是 立即数。

| 指令格式 | 指令格式 | 含义 |
|---|---|---|
| 零地址指令 | op | 执行操作 $op$,操作数隐含在栈中 |
| 一地址指令 | op, A1 | $op(A_1) \rightarrow A_1$:对 $A_1$ 操作并将结果存回 $A_1$ |
| 二地址指令 | op, A1, A2 | $(A_1) op (A_2) \rightarrow A_1$:将 $A_1$ 和 $A_2$ 运算,结果存入 $A_1$ |
| 三地址指令 | op, A3, A1, A2 | $(A_1) op (A_2) \rightarrow A_3$:对 $A_1$ 和 $A_2$ 运算,结果存入 $A_3$ |
定长和变长指令
指令长度的设计可以分为两类:
定长指令集:所有指令的长度完全相同
→ 典型架构:ARM(RISC)
→ 优点:解码简单、高效
→ 缺点:指令中可能出现浪费空间的无效字段变长指令集:不同指令具有不同长度
→ 典型架构:x86(CISC)
→ 优点:编码更紧凑,能支持更复杂操作
→ 缺点:解码过程复杂,需要准确识别指令边界
注意
这两种设计思路分别带来了两个常见问题,在试题中也经常以变形方式考查:
- 在 定长指令集 中,所有指令长度固定,而不同指令所需的 地址字段 个数不一样,如何统一表示?
- 在 变长指令集 中,指令长度不固定,CPU 又如何判断指令边界(即每条指令的起始和结束位置)?
🧩 解决思路
问题 1:定长指令中地址字段数量不统一怎么办?
解决方法是使用 无效字段填充。
即:当某条指令所需的 地址字段 不足以填满整个固定长度时,剩余部分使用 填充值(无效字段)占位。这些填充值不会影响指令执行,仅用于保证每条指令长度一致,简化硬件解码逻辑。
问题 2:变长指令中如何识别指令边界?
一种常用方案是引入 指令前缀 。
即:在每条指令的开头,设置一个前缀字段,或在 操作码 的高位嵌入标志,用来标识该指令的长度或类型。CPU 在解码时先读取前缀位,就能判断指令长度,从而准确提取整条指令。
虽然这种方式增加了解码复杂度,但换来了更大的编码灵活性与指令集的扩展能力。
操作码扩展编码
为了在统一的指令格式中支持不同 地址数 的操作,同时避免指令之间产生歧义,指令系统通常采用:
可变长度操作码 + 定长指令字 的方式,
并要求这些 操作码 遵循 前缀码 设计原则。
🌟 先举个简单的例子:
假设我们设计如下 操作码长度规则:
- 零地址指令使用 4 位 操作码
- 一地址指令使用 6 位 操作码
- 二地址指令使用 8 位 操作码
为了防止解析冲突,必须满足 前缀码 的要求:
- 任意一个 4 位 操作码不能是任何 6 位 或 8 位 操作码的前缀
- 任意一个 6 位 操作码不能是任何 8 位 操作码的前缀
这样,每条指令的 操作码 就能唯一识别其类别与长度,避免歧义,并保持系统的可扩展性和解码自同步。
🌟 再举个复杂的例子:
假设某指令系统指令长 16 位,操作码字段为 4 位,地址码字段为 4 位,采用扩展 操作码 技术,形成 三地址指令 15 条、二地址指令 12 条、一地址指令 63 条、零地址指令 16 条。
那么 三地址指令 格式如下:
二地址指令 复用 三地址指令 的 A1 字段,一地址指令 复用 三地址指令 的 A1 和 A2 字段,零地址指令 复用 三地址指令 的 A1、A2 和 A3 字段。
可以通过树形扩展得到不同指令的 op 前缀:
沿着树的边一直走到叶子结点,可以得到如下格式的指令:
| 指令类型 | 操作码 | 地址码1 | 地址码2 | 地址码3 |
|---|---|---|---|---|
| 三地址指令(15 条) | 0000 ~ 1110 | A1 | A2 | A3 |
| 二地址指令(12 条) | 1111 0000 ~ 1111 1011 | A2 | A3 | |
| 一地址指令(63 条) | 1111 1100 0000 ~ 1111 1111 1110 | A3 | ||
| 零地址指令(16 条) | 1111 1111 1111 0000 ~ 1111 1111 1111 1111 |
寻址方式
计算机中的 寻址方式(Addressing Modes)是指在 指令中如何指定操作数的位置或地址,寻址方式可以被归为以下种类:
立即数寻址
立即数寻址(Immediate Addressing)是一种将 常量值直接嵌入指令中 的寻址方式,常用于赋值、初始化、比较等基本操作。
在 立即数寻址 之中,操作数本身就是指令的一部分,而不是从寄存器或内存中取得。这种寻址方式不涉及额外的地址计算,执行效率较高。
举个实际例子,下图是指令 MOV AX, 4567H 存储结构和执行示意图,指令直接将 立即数 4567H 存储到寄存器 R1 中:
📌 示例应用
| 应用 | 示例说明 |
|---|---|
| 加载常量 | MOV AX, 5 —— 将常数 5 加入 AX |
| 比较固定值 | CMP AL, 0 —— 判断 AL 是否为零 |
寄存器寻址
寄存器寻址(Register Addressing)是一种将操作数存储在寄存器中的寻址方式。在这种模式下,指令通过指定寄存器来访问操作数,寄存器本身就是操作数的存储位置。
举个实际例子,指令 MOV AX, BX 表示将寄存器 BX 中的值复制到寄存器 AX 中:
📌 示例应用
| 应用 | 示例说明 |
|---|---|
| 拷贝寄存器内容 | MOV AX, BX —— 将 BX 内容拷贝到 AX |
| 比较寄存器 | CMP AX, BX —— 判断 AL 是否为零 |
直接寻址
直接寻址(Direct Addressing)是一种通过 在指令中显式给出操作数的内存地址 来访问数据的方式,适用于访问固定位置的数据。
在 直接寻址 中,指令中包含了操作数在内存中的确切地址。CPU 在执行指令时,会直接从该地址读取或写入数据,不依赖寄存器辅助寻址。
举个实际例子,下图是指令 MOV R1, [1000] 的执行示意图,以 立即数 1000 作为访存地址,指令从内存地址 1000 的单元读取数据并加载到寄存器 R1 中:
📌 示例应用
| 应用 | 示例说明 |
|---|---|
| 访问固定内存 | MOV AX, [0x1234] —— 读取内存地址 0x1234 的内容 |
| 读取硬件端口 | IN AL, [0x60] —— 从端口地址读取键盘输入 |
| 设置显存颜色值 | MOV [0xB8000], AL —— 设置文本模式字符颜色 |
间接寻址
间接寻址(Indirect Addressing)是一种通过 寄存器或内存中的地址来访问实际数据地址 的方式,适用于访问指针、链表等动态结构。
在 间接寻址 中,指令中提供的是一个地址的“指针”,实际的数据地址存储在寄存器或内存单元中。CPU 先访问该中间地址,再通过它获取最终的操作数地址。
举个实际例子,下图是指令 MOV R1, [R2] 的执行示意图,访存地址间接地存储在寄存器 R2 中,指令首先从 R2 中读取目标地址,然后在相应的地址中读取数据加载进入 R1 中:
间接寻址 包含多种类型,其中最常见的是 寄存器间接寻址 :
操作数的地址保存在寄存器中,CPU 通过这个寄存器中存储的地址访问内存中的操作数。
当我们提到 间接寻址 时,大多数时候都是 寄存器间接寻址:
📌 示例应用
| 应用 | 示例说明 |
|---|---|
| 通过指针访问数据 | MOV AX, [BX] —— BX 存储了目标地址 |
基址寻址
基址寻址(Base Addressing)是一种通过 基址寄存器与偏移值相加 来访问结构体字段或局部变量的方式,常见于函数调用过程中的栈帧操作。

📌 示例应用
| 应用 | 示例说明 |
|---|---|
| 栈帧内访问局部变量或参数 | MOV AX, [BP - 2]、MOV AX, [BP + 6] |
首先,两者具有共同点:基址寻址与变址寻址都类似于相对寻址,它们的有效地址 EA = 基址 + 指令字中形式地址 A。
1、基址寻址
计算公式:EA = (BR) + A
有效地址是将 CPU 中 基址寄存器 BR 的内容加上指令字中形式地址 A。BR 的内容由操作系统决定,在程序执行过程中 BR 的内容不可变,而形式地址是可变的。基址寻址 方式适合解决动态定位的问题。在多道程序的环境当中,操作系统根据内存空间的情况赋值给 BR,一旦赋值成功就不可更改,直至用户程序结束,使得用户不必关心实际的地址而只需要关心自己的地址空间即可。
2、变址寻址
计算公式:EA = (IX) + A
有效地址是将 CPU 中 变址寄存器 IX 的内容加上指令字中有效地址 A。其指令字的形式地址作为一个基准地址,内容不可变,而 CPU 中 变址寄存器 IX 在程序执行过程中根据使用情况发生改变。这样的寻址方式非常适合于循环问题,原因在于指令的“基址”(形式地址)保持不变,使得执行循环时,只需要改变 IX 的内容即可(比如迭代时,不断加 4)。假若使用 基址寻址 的方式,意味着循环过程中不断需要新的“基址”,也就是需要更多的指令字加以控制。而 变址寻址 只需要一条指令即可完成相关操作,可以大量缩短指令编码的长度,提高指令字的可用性。
两种寻址方式都是解决特定应用场景的问题,它们本质上是一样的,只是表现形式的不同而已。
变址寻址
变址寻址(Indexed Addressing)是一种通过 变址寄存器的值加上偏移量 来获取操作数地址的寻址方式,通常用于数组或表格中元素的访问。

📌 示例应用
| 应用 | 示例说明 |
|---|---|
| 多维数组访问 | MOV AX, [BX + SI] —— 行列下标组合 |
| 结构体数组成员访问 | MOV AX, [DI + SI*4] —— 每个结构体占 4 字节 |
| 动态偏移数据结构遍历 | MOV AL, [BX + CX] —— 使用索引偏移访问 |
相对寻址
相对寻址(Relative Addressing)是一种根据 当前指令地址(PC)与偏移量 来确定跳转或访问目标位置的方式,广泛应用于控制流指令。
在 相对寻址 中,以当前程序计数器(PC)作为基准,通过加上一个有符号的偏移量来计算跳转目标地址。这种寻址方式便于编写可重定位代码。
📌 示例应用
| 应用 | 示例说明 |
|---|---|
| 条件跳转(分支) | JZ LABEL —— 如果为零,跳转到相对偏移处 |
| 循环控制 | LOOP LOOP_START —— PC 相对跳转 |
| 实现函数局部跳转表 | JMP [PC + offset](某些架构中) |
堆栈寻址
堆栈寻址(Stack Addressing)是一种通过 栈指针或基址指针 来访问 栈中数据 的方式,广泛应用于函数调用过程中的参数传递和返回值保存。
在 堆栈寻址 中,利用 SP(栈指针)或 BP(基址指针)定位栈中元素,通过栈顶向下或向上偏移来读取或写入局部变量、返回地址等。通常与 PUSH、POP、CALL、RET 等指令结合使用。
📌 示例应用
| 应用 | 示例说明 |
|---|---|
| 函数调用和返回 | CALL FUNC、RET —— 使用栈存储返回地址 |
| 保存和恢复寄存器值 | PUSH AX、POP AX |
寻址方式对比
下表给出了各个 寻址方式 的核心区别:
| 寻址方式 | 描述 | 示例 |
|---|---|---|
| 立即寻址 | 操作数直接包含在指令中。 | MOV R1, #5 (将 5 加载到 R1 寄存器) |
| 寄存器寻址 | 操作数在寄存器中。 | ADD R1, R2 (R2 加到 R1 中) |
| 直接寻址 | 操作数的内存地址直接包含在指令中。 | MOV R1, [1000] (从内存地址 1000 取数据) |
| 间接寻址 | 操作数的地址存储在寄存器中,指令通过寄存器访问内存中的数据。 | MOV R1, [R2] (R2 寄存器中是内存地址) |
| 基址寻址 | 使用基址寄存器和偏移量计算操作数的实际地址。 | MOV R1, [R2 + 4] (基址 R2 加偏移 4) |
| 变址寻址 | 通过基址寄存器和索引寄存器的和来确定操作数地址,常用于数组操作。 | MOV R1, [R2 + R3] (R2 与 R3 相加) |
| 相对寻址 | 操作数地址通过程序计数器(PC)当前值加上指令中的偏移量计算,常用于跳转指令。 | JMP LABEL (跳转到相对地址) |
| 堆栈寻址 | 通过堆栈顶指针(SP)来访问操作数,常用于函数调用和返回。 | PUSH R1 (将 R1 压入堆栈) |
2 - 数据对齐方式
熟练掌握数据对齐和大小端,可能会在选择题考察,也会在大题中间接考察。
数据对齐
数据对齐 (Data Alignment)是指数据在内存中的存放方式,它要求数据的起始地址必须是某个数(通常是 1、2、4、8)的整数倍,这个数被称为 对齐因子 (Alignment Factor)。数据对齐的目的是为了提高 内存访问 的效率,因为许多计算机系统都是按照数据的对齐边界来设计 内存访问 硬件的。
不对齐 的数据访问可能会导致 性能下降,因为处理器可能需要额外的 内存访问 来获取不完整的数据。在一些严格要求 数据对齐 的架构中,不对齐 的数据访问甚至会导致 硬件异常。
在 C11 中,我们可以通过 _Alignof 来查看不同数据类型的 对齐因子:
#include <stdint.h>
#include <stdio.h>
#define EVAL_PRINT(expr) printf("%-20s = %u\n", #expr, (uint8_t)(expr));
int main(void) {
EVAL_PRINT(_Alignof(char));
EVAL_PRINT(_Alignof(uint8_t));
EVAL_PRINT(_Alignof(uint16_t));
EVAL_PRINT(_Alignof(uint32_t));
EVAL_PRINT(_Alignof(int));
EVAL_PRINT(_Alignof(uint64_t));
EVAL_PRINT(_Alignof(void*));
EVAL_PRINT(_Alignof(size_t));
return 0;
}
以上程序运行的结果如下所示,以此我们可以判断每个类型的 aglinment 大小。
$ gcc alignof.c && ./a.out
_Alignof(char) = 1
_Alignof(uint8_t) = 1
_Alignof(uint16_t) = 2
_Alignof(uint32_t) = 4
_Alignof(int) = 4
_Alignof(uint64_t) = 8
_Alignof(void*) = 8
_Alignof(size_t) = 8
以下图中的结构体定义为例,假设我们定义一个 变量,变量的类型长度为 K 个字节,那么这个 变量 在 内存 中的地址 addr 必须是 K 的整数倍,即 addr % K == 0。
上图中 变量 b 和 a 之间增加了 1 个字节的 padding,变量 d 的末尾也增加了 3 个字节 padding,以保证下一个 数据 的开始是 4 的整数倍。
大小端
大小端 (Endianness)是指多字节 数据在内存中的字节序,也就是 字节 的排列顺序。主要有两种存放方式:
大端序也叫做 大端模式 (Big-Endian): 数据内部的 高位字节 存放在 低位地址,低位字节 存放在 高位地址。也就是说,一个整数的第一个字节(最高有效字节)将存放在起始地址处。
小端序也叫做 小端模式 (Little-Endian): 数据内部的 低位字节 存放在 低位地址,高位字节 存放在 高位地址。也就是说,一个整数的最后一个字节(最低有效字节)将存放在起始地址处。
举一个例子,假如定义数组 long a[2] = {0x76543210, 0xFEDCBA98},long 类型的大小为 8 字节,数组a 在内存中的起始地址为 0x1000,则数组中两个元素在内存中的字节排列如下图所示:
注意
理解大小端的核心是要分清 字节内部的 bit 顺序 和 多字节数据的字节顺序(大小端的核心问题)
- 大小端(Endianness) 本身并 不涉及字节内部的位顺序,它只规定 字节之间在内存中的排列方式。
- 在绝大多数现代 CPU 架构中,一个字节(8 bit)的内部位顺序都是 bit7 在高位,bit0 在低位,并且在寄存器和内存访问时,bit 顺序是一致的。
大小端 的选择通常是由计算机的 CPU 架构 决定的,不同的架构有不同的 字节序 要求。例如,Intel x86 和 x86-64 架构是 小端,而网络协议通常是 大端,因为 大端 的格式在 字节流 中的表示更加直观。
最后一句话总结一下 大小端:
- 小端序 是低位字节在低地址
- 大端序 是高位字节在低地址
3 - 指令集种类
本节主要了解 CISC 和 RISC 的概念,可能在选择题中考察。后面不同位数计算机指令的差异 以及 AT&T、Intel 指令集可能在大题中间接考察。
指令体系结构
指令体系结构 (Instruction Set Architecture,简称 ISA) 是计算机体系结构中定义处理器 指令集 的规范。它是硬件与软件之间的接口,规定了处理器能够执行的 指令集合、指令格式、寻址方式、寄存器 组织、内存访问方式 以及 数据类型 等。
具体来说,ISA 包括以下关键内容:
- 指令集 :处理器支持的所有操作(如加法、跳转、加载/存储等)。
- 指令格式 :每条指令的编码结构,如操作码、操作数等。
- 寄存器 :可用的寄存器数量、类型和用途(如通用寄存器、程序计数器等)。
- 寻址方式 :如何指定操作数的存储位置(如立即数、寄存器寻址、内存寻址等)。
- 内存模型 :内存的组织方式和访问规则。
- 中断和异常处理 :如何处理外部事件或错误。
ISA 决定了软件如何与硬件交互,是 编译器、操作系统 和 应用程序 开发的基础。常见的 ISA 包括 x86、ARM、RISC‑V 等,每种 ISA 在 性能、功耗 和 应用场景 上各有特点。例如,RISC (精简指令集计算机)强调 简单高效 的指令,而 CISC (复杂指令集计算机)提供更 复杂 的指令以减少代码量。
简而言之,ISA 是计算机的核心“语言”,定义了处理器能做什么以及如何做。
复杂和精简指令集
CISC (Complex Instruction Set Computer)和 RISC (Reduced Instruction Set Computer)是两种不同的计算机体系结构设计哲学,它们在 指令集架构 和 执行方式 上有显著的差异。

CISC
- 指令集复杂 :CISC 指令集包含大量 复杂的指令,其中一条指令可以执行多种操作,包括 内存访问、算术运算、逻辑运算 等。
- 指令不定长 :CISC 支持多种长度的指令。
- 多寻址模式 :CISC 指令通常支持多种 寻址模式,允许直接访问内存,因此可以在一条指令中执行复杂的操作。
- 微程序控制 :CISC 计算机通常使用 微程序控制单元,指令解码和执行过程相对复杂。
- 复杂硬件 :CISC 处理器通常包括大量的硬件单元,用于支持 复杂的指令集,这使得 CISC 芯片相对较大。
CISC 的典型芯片就是 x86 系列,如 Intel 的 Core i 系列处理器和 AMD 的 Ryzen 系列处理器。
RISC
- 指令集精简 :RISC 计算机的指令集更加精简,通常包含较少、更 简单的指令。每条指令只执行一种操作。
- 指令定长 :RISC 指令集中所有指令长度相同。
- 固定寻址模式 :RISC 指令通常只支持一种或者很少种 寻址模式,鼓励将数据加载到寄存器中后再执行操作。
- 硬布线控制 :RISC 计算机使用 硬布线控制单元,指令解码和执行过程较为简单。
- 精简硬件 :RISC 处理器通常采用更 精简的硬件,以提高 性能 和降低 成本。
RISC 的典型芯片就是 arm 系列,比如苹果的 A 系列和 M 系列处理器。
上图体现了 CISC 和 RISC 的差别:RISC 寄存器数量比 CISC 更多,CISC 的访存指令比 RISC 更加复杂(CISC 单条指令完成的工作 RISC 需要多条指令才能完成)。
程序示例
这一节举个实际的例子说明一下 CISC 和 RISC 上的汇编代码区别。
for (i = 0; i < 24; i++)
for (j = 0; j < 24; j++)
...
a[i][j] = 10;
...
对于上述的循环代码段,编译器将其编译为如下的 intel x86 汇编代码(CISC)和 arm mips 汇编代码(RISC):
for (i = 0; i < 24; i++)
1 00401072 C7 45 F8 00 00 00 00 mov dword ptr [ebp-8], 0 ; i = 0,初始化 i 变量
2 00401079 EB 09 jmp 00401084h ; 跳转到循环条件检查
3 0040107B 8B 55 F8 mov eax, [ebp-8] ; 读取 i 的值到 eax
... ... ...
7 00401088 7D 32 jge 004010BCh ; 若 i >= 24,跳出循环
for (j = 0; j < 64; j++)
8 0040108A C7 45 FC 00 00 00 00 mov dword ptr [ebp-4], 0 ; j = 0,初始化 j 变量
... ... ...
a[i][j] = 10;
... ... ...
19 004010AE C7 84 82 00 20 42 00 0A 00 00 00
mov dword ptr [ecx+edx*4+00422000h], 0Ah
; 存储 10 到 a[i][j],计算地址:
; ecx = i, edx = j
; a[i][j] = 10
20 ... ...
for (i = 0; i < 24; i++)
1 00401000 20020000 addi $v0, $zero, 0 # i = 0
2 00401004 08004004 j 0x00401010 # 跳转到循环条件检查
3 00401008 8C430008 lw $v1, 8($fp) # 读取 i
... ... ...
7 00401010 1C600018 bge $v1, 24, 0x00401040 # if (i >= 24) 跳出循环
for (j = 0; j < 64; j++)
8 00401014 20040000 addi $a0, $zero, 0 # j = 0
... ... ...
a[i][j] = 10;
17 00401028 00031880 sll $v1, $v1, 6 # i × 64
18 0040102C 00641820 add $v1, $v1, $a0 # i × 64 + j
19 00401030 00031880 sll $v1, $v1, 2 # (i × 64 + j) × 4
20 00401034 3C010042 lui $at, 0x0042 # 加载基地址高 16 位
21 00401038 34222000 ori $v0, $at, 0x2000 # 完整基地址 0x00422000
22 0040103C 00621020 add $v0, $v1, $v0 # 计算目标地址
23 00401040 2405000A li $a1, 10 # 10 存入 $a1
24 00401044 AC450000 sw $a1, 0($v0) # a[i][j] = 10
25 ... ...
对比
CISC 和 RISC 的主要区别如下表所示:
| 特性 | CISC | RISC |
|---|---|---|
| 指令集 | 复杂,指令数量多 | 精简,指令数量少 |
| 指令长度 | 不定长 | 固定长度 |
| 寻址模式 | 多种寻址模式 | 较少寻址模式 |
| 控制方式 | 微程序控制 | 硬布线控制 |
| 硬件复杂度 | 复杂 | 精简 |
| 优点 | 功能强大,一条指令可完成复杂操作 | 性能高,功耗低 |
| 缺点 | 硬件复杂,指令执行效率相对较低 | 功能相对简单,复杂操作需要多条指令完成 |
不同位数指令
从 8086(16 位 intel 处理器)再到后来的 32 位 以及 64 位 的 CPU,差异主要体现在以下几个方面:
- 寄存器位数 和 命名 不同:32 位寄存器有
E前缀,64 位寄存器有R前缀。 - 指令集 不同:32 位处理器相比 16 位处理器有着更加复杂的指令集,64 位处理器的指令集也比 32 位更加复杂。
下表中给出了不同位数寄存器的对比,注意每个寄存器的开头都与一个 单次 相对应,在最初 8086 的设计中这是代表一种语义。
| 寄存器 | 16 位 | 32 位 | 64 位 | 类型 |
|---|---|---|---|---|
| Accumulator | AX | EAX | RAX | General |
| Base | BX | EBX | RBX | General |
| Counter | CX | ECX | RCX | General |
| Data | DX | EDX | RDX | General |
| Source Index | SI | ESI | RSI | Pointer |
| Destination Index | DI | EDI | RDI | Pointer |
| Base Pointer | BP | EBP | RBP | Pointer |
| Stack Pointer | SP | ESP | RSP | Pointer |
| Instruction Pointer | IP | EIP | RIP | Pointer |
| Code Segment | CS | - | - | Segment |
| Data Segment | DS | - | - | Segment |
AT&T 和 Intel 指令
在 x86 汇编指令集中,常有 AT&T 和 Intel 两种格式,两种格式有较大差异。在考试中主要考察的是 Intel 格式,但是 AT&T 也需稍作了解,在遇到指令时能辨认出即可。
Intel 格式
# 寄存器访问
mov eax,1
mov ebx,0ffh
# 内存访问
mov eax,[ebx]
mov eax,[ebx+3]
AT&T 格式
# 寄存器访问
movl $1,%eax
movl $0xff,%ebx
# 内存访问
movl (%ebx),%eax
movl 3(%ebx),%eax
两种指令格式的不同主要在于 Intel 格式的 目的操作数 在左,源操作数 在右,而 AT&T 格式 目的操作数 在右,源操作数 在左。
两种指令格式的具体表格如下表所示:
| 特性 | Intel 格式 | AT&T 格式 |
|---|---|---|
| 操作数顺序 | 目的,源 | 源,目的 |
| 寄存器 | eax, ebx... | %eax, %ebx... |
| 常数 | 10, 0x20... | $10, $0x20... |
| 内存寻址 | [] | () |
4 - 高级语言和机器码
掌握从高级语言到机器代码的翻译过程,也需了解 C 语言中不同语句与汇编代码的对应关系,可能在大题中出现,常与 cache 和 虚拟内存 放在一起考察。
编译过程
一个传统的 C 程序从源代码到可执行二进制程序的过程中,需要经历 预处理(Preprocess)、 编译(Compile)、 汇编(Assemble)、 链接(Link)四个步骤,这四个步骤分别由 预处理器(Preprocessor)、 编译器(Compiler)、 汇编器(Assembler)、 链接器(Linker)完成。
预处理
预处理(Preprocess)阶段负责对 源代码(source code)进行文本的转换和处理,将其转化为 扩展代码(expanded code)。具体而言,预处理阶段包含如下工作:
- 头文件包含:将
#include指令包含的头文件内容插入到源文件中。 - 宏替换:将源代码中定义的宏
#define进行替换。 - 删除注释:将代码中的注释删除。
编译
编译(Compile)阶段将 预处理后源代码(extended code)翻译成 汇编代码(assembly code)。编译阶段包含 词法分析、语法分析、语义分析、中间代码优化 和 汇编代码生成 等子过程。
注意
注意 编译(compilation)这个词一般的含义是将高级语言代码转化为二进制程序,但是如果在整个编译流程中谈到这个词,则需要将其与 汇编(assemble)进行区分:
- 编译是将高级语言代码转化为 汇编代码
- 汇编是将 汇编代码转化为二进制代码
汇编
汇编(Assemble)阶段负责将 汇编代码(assembly code)转换为 目标文件(object file)。汇编器(assembler)解析 汇编指令,将其翻译为对应的 机器码。
链接
如上图所示,链接器(linker)的作用是将由编译器生成的一个或多个 目标代码文件(object file,通常是汇编器生成的机器代码)合并为一个单一的 可执行文件。在这个过程中,链接器主要完成如下任务:
- 符号解析:查找所有未定义的符号(如函数调用、全局变量)并找到对应的定义。
- 重定位:确定 目标文件中的符号地址,并更新相关指令或数据。
- 合并代码和数据段:将不同 目标文件的代码和数据合并,形成最终的 可执行文件。
链接分为 静态链接 和 动态链接 两种方式。
- 静态链接:静态链接是在编译时将所有依赖的库代码拷贝到最终的 可执行文件 中,生成一个 完全独立的二进制文件。
- 动态链接:动态链接不会在编译时将库代码合并,而是在运行时加载外部共享库(.so / .dll)。可执行文件 只包含对库的引用,而不包含库的代码。
汇编代码
高级语言程序对应的 汇编代码 常常与 存储系统 在大题中进行综合考察,这里需要重点掌握 选择、循环、函数调用 语句对应的汇编代码。
选择结构语句
选择结构 在汇编中通过 条件比较指令(如 cmp)设置标志位,再利用 条件跳转指令(如 jle, jne 等)决定程序流程是否进入某个分支,同时通过 无条件跳转(jmp)跳过不应执行的分支,最终形成“判断 ➝ 跳转 ➝ 执行 ➝ 合流”的控制流图结构。
选择结构 C 语言
if (a > b) {
max = a;
} else {
max = b;
}
汇编
; 假设 a, b 的值分别存放在寄存器 eax 和 ebx 中
; 比较 a 和 b
cmp eax, ebx
; 如果 a <= b, 跳转到 else_label
jle else_label
; a > b 的分支,无需跳转
mov max, eax ; max = a
jmp endif_label ; 跳转到 endif_label
; a <= b 的分支
else_label:
mov max, ebx ; max = b
; 执行结束
endif_label:
上述的汇编代码可以通过以下图示辅助理解:
循环结构语句
循环结构在 汇编中以一个入口标签开始,通过 cmp 或类似指令判断循环条件,结合 条件跳转(如 jge, jl)决定是否继续执行循环体,然后在循环末尾使用 无条件跳转(jmp)返回判断处,形成“判断 ➝ 执行 ➝ 跳回 ➝ 再判断”的闭环结构,直到条件不满足跳出循环。
C 语言中循环语句有 while、do-while 和 for 三种,三者执行流程稍有差别,但核心都在于都使用 条件跳转 控制循环流程:
while 语句
while 循环在汇编中实现的关键是 “先判断、后执行”,即编译器会先生成一个条件判断的跳转逻辑,如果条件不满足则跳出循环,否则进入循环体执行,再跳回判断位置重复该过程。
for 语句
while (count < 10) {
count++;
}
汇编
; 假设 count 的值存放在寄存器 ecx 中
start:
cmp ecx, 10 ; 比较 count 和 10
jge end ; 如果 count >= 10, 跳出循环
inc ecx ; count 增加
jmp start ; 无条件跳回循环开始
end:
上述的汇编代码可以通过以下图示辅助理解:
do-while 语句
do-while 循环的核心在于 “先执行一次,再判断”,因此汇编中先直接执行循环体,然后再进行条件判断,根据比较结果决定是否跳回继续执行。这种结构通过将判断逻辑放在循环体之后,确保循环体至少执行一次。
do while 语句
do {
count++;
} while (count < 10);
汇编
; 假设 count 存放在 ecx 中
start:
inc ecx ; count++
cmp ecx, 10 ; 比较 count 和 10
jl start ; 若 count < 10,继续循环
end:
上述的汇编代码可以通过以下图示辅助理解:
for 语句
for 循环在汇编中的实现是将 初始化、判断、更新三个阶段明确拆分:先初始化循环变量,再判断是否进入循环体;执行完循环体后进行变量更新,并跳回判断位置。它的本质是 while 循环的结构化变体,但语义更集中,便于生成高效指令序列。
for C 语言
for (int i = 0; i < 10; i++) {
sum += i;
}
汇编
; 假设 i 存在 ecx 中,sum 存在 eax 中
mov ecx, 0 ; 初始化 i = 0
mov eax, 0 ; 初始化 sum = 0
loop_start:
cmp ecx, 10 ; 判断 i < 10
jge loop_end ; 如果 i >= 10,跳出循环
add eax, ecx ; sum += i
inc ecx ; i++
jmp loop_start ; 回到判断
loop_end:
上述的汇编代码可以通过以下图示辅助理解:
函数定义和调用
在 C 语言中,每一个函数调用在底层都会被编译为一套具体的 汇编指令。为了实现 函数的参数传递、局部变量管理、返回值传递等,汇编层面必须精细地管理 栈帧(stack frame)、寄存器(register)以及 指令流程(control flow)。
函数调用在汇编中的三大阶段:
- 函数入口
- 保存寄存器:保存 caller 的寄存器,以确保在函数执行完后,寄存器的值不被改变。
- 设置栈帧:保存 caller 的栈帧,设置 callee 的栈帧。
- 函数体
- 这部分是函数的执行逻辑,会包含各种操作指令,此时 局部变量会被保存到栈上。
- 函数返回
- 如果函数有返回值,通常会将结果保存在 eax 寄存器中。
- 恢复栈帧:恢复栈指针,确保栈帧被正确销毁。
- 恢复寄存器:如果函数入口时保存了寄存器,那么在返回之前,需要将它们恢复。
补充
在理解汇编时,caller 和 callee 是两个非常关键的术语:
caller:调用某个函数的一方。callee:被调用的函数本身。
这一节可以结合 函数调用时内存结构 共同理解,下面通过几个简单的例子说明以下 函数定义 和 调用。
函数定义
本节以一个非常简单的加法函数 add 进行说明:
add 函数
int add(int x, int y) {
return x + y;
}
汇编
; 假定 'a' 和 'b' 作为参数通过堆栈传递
.globl _add
_add:
; 保存 caller 的 ebp
push ebp
; 设置 callee 的 ebp
mov ebp, esp
; x + y 的汇编表示
mov eax, [ebp+8]
add eax, [ebp+12]
; 恢复 caller 的 ebp
pop ebp
; 函数返回
ret
说明
add函数的两个参数x和y是通过栈传递的。[ebp+8]和[ebp+12]分别代表第一个和第二个参数。- 函数返回值被保存在 eax 寄存器中。
push ebp / mov ebp, esp是标准做法,用于设置新函数的栈帧,确保不同函数调用之间互不干扰。
函数调用
再看一个稍复杂的例子,func 函数调用了 add 函数。
func 函数
void func(int a, int b) {
int sum = add(a, b);
int var = sum * 2;
// ... 一些使用 var 的代码 ...
}
汇编
.globl _func
_func:
push ebp
mov ebp, esp
; 调用函数 add
sub esp, 8
push dword [ebp+12]
push dword [ebp+8]
call _add
add esp, 8
; 保存返回值
mov [ebp-4], eax
mov eax, [ebp-4]
; 将eax左移1位,相当于乘以2
shl eax, 1
; 将结果存储到 'var'
mov [ebp-8], eax
; ... 更多使用 'var' 的代码 ...
; 函数完成,清理堆栈,并恢复ebp
mov esp, ebp
pop ebp
ret
说明:
- 调用
add(a, b)之前,参数是从右往左压栈的,这是C语言默认的调用约定(cdecl)。 call _add会把当前指令地址压入栈中(以便ret时跳回来)。- eax 保存了
add的返回值,存入局部变量sum。 - 使用
shl eax, 1是将sum乘以2(左移一位即乘 2)。
5 - 指令操作码
本节介绍指令系统中不同操作码的具体细节,作为指令格式一节的参考。
不同计算机架构的指令操作码不相同,但是其中涉及到的功能却大同小异。本节以 x86 平台的指令为例,说明一下指令操作码的主要分类和功能。
数据传输指令
数据传送
数据传送指令在 x86 中就是 MOV,将第二个操作数(寄存器的内容、内存中的内容或常数值)复制到第一个操作数(寄存器或内存),可以实现 寄存器、内存之间的 数据传送。
; 数据传送指令语法
mov <reg>, <reg> ; 复制寄存器值
mov <reg>, <mem> ; 从内存加载数据到寄存器
mov <mem>, <reg> ; 把寄存器值存入内存
mov <reg>, <con> ; 立即数赋值给寄存器
mov <mem>, <con> ; 立即数赋值给内存; 数据传送指令实例
mov eax, ebx ; 把 ebx 复制到 eax
mov eax, [var] ; 把变量 var 的值存入 eax
mov [var], eax ; 把 eax 的值存入变量 var
mov ecx, 100 ; 将 100 赋值给 ecx
mov byte ptr [var], 5 ; 只修改 var 指向的 1 字节栈操作
堆栈 指的是程序的运行栈,从高地址向低地址增长。PUSH 指令将 数据压入栈顶,POP 指令从栈顶取出 数据,并存入 寄存器或者 内存单元。
push <reg> ; 将寄存器值压入堆栈
push <mem> ; 将内存值压入堆栈
push <con> ; 将立即数压入堆栈
pop <reg> ; 从堆栈弹出值存入寄存器
pop <mem> ; 从堆栈弹出值存入内存push eax ; 将 eax 压入栈
push 10 ; 将 10 压入栈
pop ebx ; 弹出栈顶的值存入 ebx; PUSH 指令等同于以下指令序列
sub esp, 4 ; esp 向低地址移动
mov [esp], eax ; 把 eax 的值写入栈顶; POP 指令等同于以下指令序列
mov ebx, [esp] ; 从栈顶读取值
add esp, 4 ; esp 向高地址移动- 当执行
PUSH指令时,需要将ESP的值 减去数据大小,然后将 数据写入新地址处。 - 当执行
POP指令时,需要将栈顶的 数据(即[ESP]处的值)读取到目标 寄存器或 内存,然后将ESP的值 加上数据大小,即弹出 数据。
下图给出了一个入栈出栈指令的实例,通过 PUSH 和 POP 指令实现了 寄存器 EAX 和 EBX 内容交换:
算术和逻辑运算指令
加减
可以通过 ADD 和 SUB 两个指令实现 加减操作:
ADD指令执行 加法,将结果存入第一个操作数。SUB指令执行 减法:第一个操作数减去第二个操作数。
add <reg/mem>, <reg/mem/con> ; 加法
sub <reg/mem>, <reg/mem/con> ; 减法add eax, ebx ; eax ← eax + ebx
sub eax, 10 ; eax ← eax - 10
add [var], cl ; var ← var + cl乘除
在 x86 架构中,乘除法使用专门的指令 MUL、IMUL、DIV 和 IDIV,它们大多依赖默认 寄存器(如 EAX 和 EDX),操作前需准备好相关 寄存器的值。
; 无符号乘法
mul <reg/mem> ; EAX × 操作数 → EDX:EAX
; 有符号乘法
imul <reg/mem> ; EAX × 操作数 → EDX:EAX
imul reg, <reg/mem> ; reg ← 被乘数 × 操作数
imul reg, <reg/mem>, <imm> ; reg ← 操作数 × 常数
; 无符号除法
div <reg/mem> ; 被除数:EDX:EAX,商 → EAX,余数 → EDX
; 有符号除法
idiv <reg/mem> ; 被除数:EDX:EAX,商 → EAX,余数 → EDX; 无符号乘法
mov eax, 6
mov ebx, 4
mul ebx ; → EAX = 24, EDX = 0
; 有符号乘法
mov eax, -6
mov ebx, 4
imul ebx ; → EAX = -24, EDX = 0
imul ecx, ebx ; ecx ← ecx * ebx
imul edx, ebx, 10 ; edx ← ebx * 10
; 无符号除法
mov edx, 0 ; 高位清零
mov eax, 20
mov ecx, 3
div ecx ; → EAX = 6, EDX = 2 (20 ÷ 3)
; 有符号除法
mov eax, -20
cdq ; EDX ← EAX 的符号扩展
mov ecx, 3
idiv ecx ; → EAX = -6, EDX = -2除法指令可能会触发 异常:
- 除数等于 0:无符号或有符号除法中,如果除数是 0,会导致数学上未定义,立即触发异常。
- 结果溢出:特别常见于
IDIV有符号除法中,被除数是最小负数0x80000000,除以-1会得到0x80000000(超出32位有符号整数范围)。
位操作
位操作用于对 寄存器或 内存中的二进制位直接进行按位运算,位操作包含如下类型:
AND:保留指定位,其它位清零;OR:将指定位设置为 1;XOR:将指定位翻转(0 ↔ 1);NOT:将所有位取反(补码的按位非);
and <reg/mem>, <reg/mem/con> ; 按位与:目标 ← 目标 & 源
or <reg/mem>, <reg/mem/con> ; 按位或:目标 ← 目标 | 源
xor <reg/mem>, <reg/mem/con> ; 按位异或:目标 ← 目标 ^ 源
not <reg/mem> ; 按位取反:目标 ← ~目标; 按位与:清除低位
and eax, 0xF0 ; eax ← eax & 0xF0,仅保留高 4 位
; 按位或:设置低位
or eax, 0x0F ; eax ← eax | 0x0F,将低 4 位全部置为 1
; 按位异或:清零技巧
xor eax, eax ; eax ← eax ^ eax,结果为 0
; 按位取反:翻转全部位
not eax ; eax ← ~eax自增自减
自增(INC)与自减(DEC)分别等价于对操作数 加 1 或 减 1,常用于循环计数或栈指针调整等场景。
INC等同于ADD 1。DEC等同于SUB 1。
inc <reg/mem> ; 加 1:目标 ← 目标 + 1
dec <reg/mem> ; 减 1:目标 ← 目标 - 1inc eax ; eax ← eax + 1
dec ebx ; ebx ← ebx - 1
inc byte [cnt] ; 将内存中 cnt 所指的字节加 1比较
CMP 指令用于 比较两个操作数的差值,不保存结果,只更新条件标志位(如 ZF、SF、CF、OF),常与条件跳转指令配合使用。
本质上,CMP A, B 等价于 SUB A, B,但不会改变 A 的值。
cmp <reg/mem>, <reg/mem/con> ; 比较:目标 - 源,仅影响标志位cmp eax, ebx ; 比较 eax 和 ebx
je equal_label ; 若 eax == ebx,跳转
cmp byte [x], 0
jl less_than_zero ; 若 [x] 为负数,跳转比较运算和加减操作一样,会影响以下 条件标志:
ZF(Zero Flag):结果是否为零SF(Sign Flag):结果是否为负CF(Carry Flag):是否产生了进位/借位(无符号溢出)OF(Overflow Flag):是否有符号溢出
这些标志用于后续的 条件跳转,如 je、jg、jl 等。
移位
移位是一种常见的位运算操作,常用于实现快速的乘法、除法、符号扩展等功能。根据处理方式不同,移位可分为 逻辑移位、算术移位和循环移位三类:
- 逻辑移位(Logical Shift):用于 无符号整数,空位统一用
0填充。 - 算术移位(Arithmetic Shift):用于 有符号整数,右移时保持符号位不变。
- 循环移位(Rotate Shift):将移出的位补回另一端,不丢失任何一位。
常见的移位指令如下表所示:
| 指令 | 含义 | 说明 |
|---|---|---|
SHL/SAL | 左移(逻辑/算术) | 功能相同,等效于乘以 2 的幂 |
SHR | 逻辑右移 | 高位补 0,用于 无符号数 |
SAR | 算术右移 | 高位补符号位(即保留符号),用于 有符号数 |
ROL | 循环左移 | 将最高位移出,补入最低位,位模式循环 |
ROR | 循环右移 | 将最低位移出,补入最高位,位模式循环 |
逻辑移位适用于 无符号整数,移位时将空出的位补为 0,不考虑操作数的符号。
- 逻辑左移 (
SHL):整体向左移动,低位补0,高位移出丢弃; - 逻辑右移 (
SHR):整体向右移动,高位补0,低位移出丢弃。
; 逻辑移位的实例
mov al, 10000000b ; 原值 -128(补码表示)
shr al, 1 ; 结果变为 01000000b,即十进制 64
尽管原数是负数,但使用 SHR 逻辑右移时,仍然将高位补 0,因此结果不再保留符号。
算术移位适用于 有符号整数,在右移时会 保留符号位(最高位),使符号不变,符合数学意义上的除法。
- 算术左移 (
SAL):整体向左移动,低位补0,高位移出丢弃; - 算术右移 (
SAR):整体向右移动,最高位保持原符号位的值。
; 算术移位的实例
mov al, -16 ; 二进制补码:11110000(0xF0)
sar al, 1 ; 结果:11111000(0xF8)→ -8
由于保留了最高位 1,右移后结果仍为负数。
循环移位(Rotate Shift)是一种将移出的位 重新从另一端补入 的移位方式,不改变位的总数,也不会丢弃任何一位,常用于加密、校验等需要 “保留所有信息” 的场景。
常见类型包括:
- 循环左移 (
ROL):将最高位移出后补入最低位; - 循环右移 (
ROR):将最低位移出后补入最高位。
; 循环右移的实例
mov al, 10000001b ; 原值:0x81
ror al, 1 ; 结果:11000000b(原最低位 1 补到了最高位)
与逻辑移位和算术移位不同,循环移位不引入新的位填充,因此所有位的内容只是位置发生变化,适用于 无符号与有符号数 的位模式操作,但不适合做乘除法运算。
控制转移指令
无条件跳转
无条件跳转到某个标签(label)。
标签是一个可识别的标识符,标签通常是一个有意义的名字,后跟一个冒号,用于标记程序中的某个位置或地址。
jmp label
跳转指令编译后通常使用 相对寻址,也就是 跳转偏移量 是相对于下一条指令的地址(即当前 PC + 指令长度) 来计算的。
对于 jmp label 指令,若 label 在距离当前指令之后 N 字节处,则相对寻址的偏移量可以通过以下公式计算:
偏移量 = 标签地址 - (当前 PC 值 + 指令长度)
条件跳转
在 CMP 指令后常常跟一个 条件跳转 指令,条件跳转指令会检查 标志寄存器(FLAGS)的标志,从而决定是否跳转到某个标签(条件成立时),如果选择不跳转的话,则继续向后执行。
| 指令 | 全称 | 跳转条件 |
|---|---|---|
JE/JZ | jump equal/zero(相等/零) | ZF=1 |
JNE/JNZ | not equal/zero(不等/非零) | ZF=0 |
JG(大于) | greater(大于) | ZF=0 且 SF=OF |
JL(小于) | less(小于) | SF≠OF |
JGE(大于等于) | greater equal(大于等于) | SF=OF |
JLE(小于等于) | less equal(小于等于) | ZF=1 或 SF≠OF |
; 比较 eax 和 ebx 的值
cmp eax, ebx
; 执行条件跳转
je equal_label
条件跳转的过程可以通过下图进行辅助理解:
子程序调用
在汇编语言中,调用一个子程序通常使用 CALL 指令,执行完子程序后使用 RET 指令返回。两者配合,实现了 从主程序跳转到子程序,再返回继续执行 的控制流程。
call subroutine
...
subroutine:
; 执行一些操作
ret
CALL 指令用于 调用子程序,涉及以下步骤:
- 保存返回地址:将当前指令的下一个地址(即返回地址)压入栈中,这样子程序返回时才知道从哪一条指令继续执行。
- 跳转到子程序:将程序计数器设置为子程序的入口地址,开始执行子程序的代码。
RET 指令用于 从子程序返回到调用函数,涉及以下步骤:
- 从栈中弹出返回地址:从栈顶弹出一个值,并将这个值作为返回地址。这是之前
CALL指令压入栈的地址。 - 跳转到返回地址:将程序计数器设置为返回地址,继续执行从调用子程序的指令的下一条指令。
子程序调用的过程可以通过下图进行辅助理解:
陷阱指令
陷阱指令(Trap Instruction)是一类特殊的 同步异常触发指令,用于从 用户态切换到内核态,以请求操作系统执行特权操作。它们本质上是一种 软件中断机制,通常用于:
- 实现 系统调用(如文件操作、进程控制等);
- 支持 断点调试(例如 IDE 或 GDB 中设置断点);
- 报告程序运行中出现的 异常情况(如除 0、非法访问)等。
陷阱的特点是由 程序主动触发,与硬件中断(如 I/O、时钟中断)区分开来。
INTINT 指令用于产生一个软件中断,它后面跟着一个中断向量号(通常是一个字节大小的立即数),用于指定要调用的中断或服务例程:
INT n ; n 为中断向量号(0~255)
执行后,CPU 根据中断向量号 n 查找 中断向量表(Interrupt Vector Table, IVT)中对应的处理程序地址,并跳转执行。常见用法如下:
mov eax, 1 ; 系统调用:exit
mov ebx, 0 ; 退出代码
int 0x80 ; 触发中断
补充
Trap 指令和 TF 标志位的区别
陷阱指令(如 INT) ≠ TF 标志位。
INT指令显式触发陷阱,由程序执行。- TF 是 EFLAGS 寄存器中的一个位,设置为 1 后每执行一条指令就引发一次单步中断(INT 1),用于单步调试。
- 二者都能进入内核态,但触发机制不同。
Trap 指令一般通过 INT 指令执行,TF 标志位通过 PUSHF 和 POPF 修改。
协处理器指令
开关中断
CLI 和 STI 用于控制 CPU 的 中断响应能力。具体来说,这两条指令用于修改处理器的 中断标志(IF,Interrupt Flag),从而控制外部硬件中断的使能和禁止。
中断标志 (IF) 是状态寄存器中的一个标志位。如果 IF 位被设置(即为 1),处理器将响应外部硬件中断。如果 IF 位被清除(即为 0),处理器将忽略外部硬件中断请求。
CLI:清除 中断标志位(Clear Interrupt Flag),将 IF 位设置为 0,从而禁止处理器响应外部硬件中断。STI:设置 中断标志位(Set Interrupt Flag),将 IF 位设置为 1,从而允许处理器响应外部硬件中断。
cli ; 关闭中断
sti ; 开启中断
输入输出
IN 和 OUT 指令用于处理与外部设备的 输入/输出(I/O)操作。这些指令让 CPU 可以直接与硬件端口通信,从而读取或发送数据。
IN:从指定的 I/O 端口读取数据到 寄存器。通过IN指令,可以从硬件设备读取状态信息或数据。OUT: 将寄存器中的数据写入到指定的 I/O 端口。通过OUT指令,CPU 可以向设备发送控制命令或数据。
; 输入指令
in reg, port ; 从 I/O 端口 port 读取一个字节/字到 reg 寄存器
; 输出指令
out port, reg ; 将 reg 寄存器中的值写入 I/O 端口 port; 读取键盘控制器状态(端口 0x60)
in al, 0x60
; 将 AL 中的数据再次写回键盘控制器
out 0x60, al注意 I/O 端口的 编址方式 有两种:统一编址 和 独立编址,IN/OUT 指令仅适用于独立编址,对于统一编址,使用 MOV 指令即可完成输入输出。
输入输出指令(如 IN / OUT)常用于 程序查询方式 和 程序中断方式 中,由 CPU 发出指令与设备进行数据交换。相比之下,DMA 方式则由硬件控制器自动完成传输,通常不依赖此类指令。
程序查询方式 和 程序中断方式 这两种 I/O 方式的实现的核心逻辑可以参考下述代码:
// 用户态伪代码
write_to_device(data) {
while (1) {
if (kernel_read_port(STATUS_PORT) & READY_BIT) { // 轮询
kernel_write_port(DATA_PORT, data); // 实际执行 OUT
break;
}
}
}
// 内核态驱动伪代码,用一个 C 函数封装了底层输入输出汇编指令
// 通过读取端口内容,获取设备状态
uint8_t kernel_read_port(uint16_t port) {
asm("in %%dx, %%al" : "=a"(value) : "d"(port));
return value;
}
// 通过端口向设备写入
void kernel_write_port(uint16_t port, uint8_t data) {
asm("out %%al, %%dx" : : "a"(data), "d"(port));
}// 用户程序只发起请求,挂起等待中断
read_from_device(buffer) {
request_read(); // 向设备发送读取命令
}
// 内核:中断服务例程
interrupt_handler() {
uint8_t data = inb(DATA_PORT); // IN 指令读取设备数据
kernel_buffer = data;
wake_up_user();
}- 在程序查询方式中,CPU 通过反复执行 输入输出指令轮询设备状态,当设备准备就绪后再通过 输入输出指令执行读写操作。
- 在中断方式中,当设备准备好数据后会向 CPU 发送中断信号;CPU 响应后进入中断服务程序,并在其中执行 输入输出指令与设备进行数据交换。
字符串操作指令
字符串操作指令基本不考察,这里简单了解即可。
MOVS复制字符串(ES:EDI ← DS:ESI)。
movs byte ptr es:[edi], byte ptr ds:[esi] ; 复制 1 字节
movs dword ptr es:[edi], dword ptr ds:[esi] ; 复制 4 字节
从 DS:ESI 加载数据到 AL/AX/EAX。
lodsb ; 读取 1 字节
lodsd ; 读取 4 字节
将 AL/AX/EAX 存储到 ES:EDI。
stosb ; 存储 1 字节
stosd ; 存储 4 字节
比较两个字符串。
cmpsb ; 比较字节
cmpsd ; 比较 4 字节
总结
| 指令类别 | 说明 |
|---|---|
MOV | 数据传输 |
PUSH/POP | 堆栈操作 |
ADD/SUB | 加减运算 |
MUL/DIV | 乘除运算 |
AND/OR/XOR/NOT | 逻辑运算 |
CMP | 比较 |
JMP | 无条件跳转 |
Jxx | 条件跳转 |
CALL/RET | 子程序调用 |
IN/OUT | 输入/输出 |
MOVS/LODS/STOS | 字符串操作 |
INT | 触发中断 |
CLI/STI | 控制中断 |